ラマンイメージでわかること
ラマンイメージからは、サンプルに含まれる化学物質や構造の分布がわかります。ラマンイメージの取得方法と解析方法を紹介します。
ラマンイメージからわかること
ラマンイメージの各ピクセルのスペクトル情報から、以下の情報を把握することができます。
- 物質または成分の有無
- 未知の物質の有無
- 物質または成分の分布
- 粒子またはドメインのサイズ
- 物質または化学成分の相対量
- 結晶化度や応力状態などの、物質の構造的な変化
- ポリマーラミネートなどの層状の物質の厚さと構造 (ミクロン単位からミリメートル単位の厚さ)
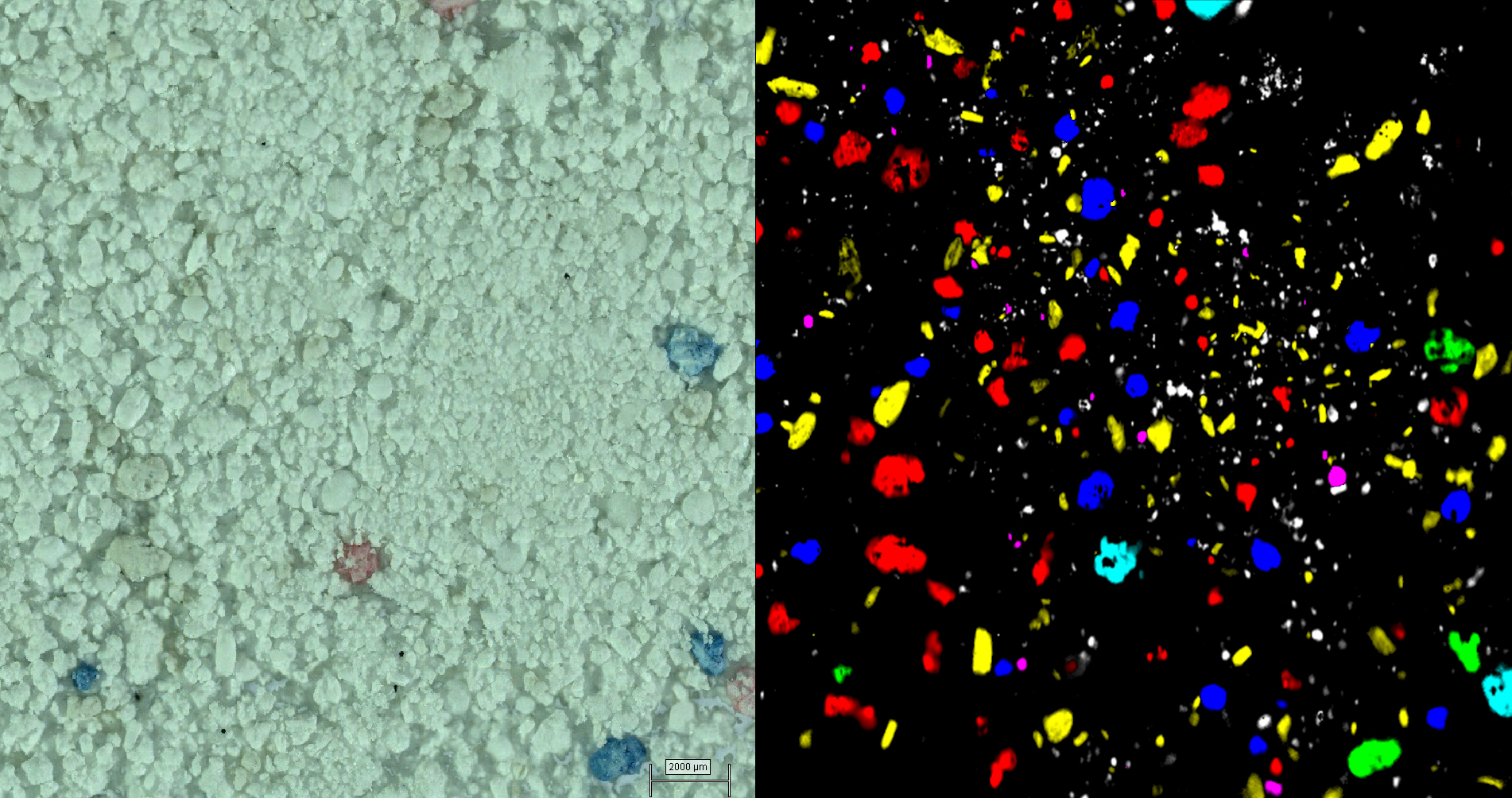
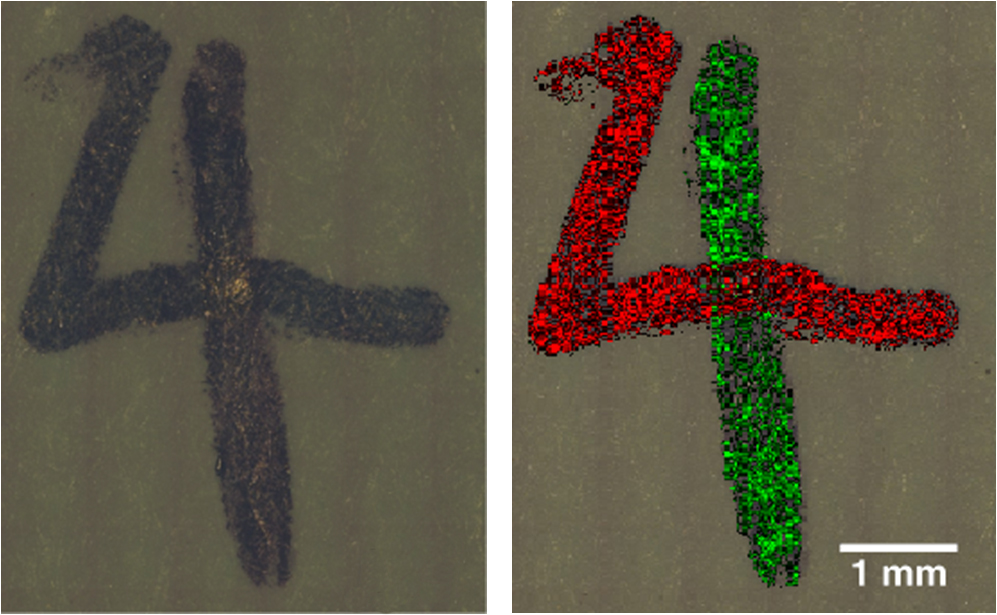
粉末洗剤の白色光イメージとラマンイメージ。ラマンイメージでは、白色光イメージでは見えない化学物質のドメインが確認できます。
定性的、定量的なラマンイメージング
疑似色のラマンイメージは、サンプル内の化学的性質や構造上の性質の分布を確認するうえで有効なツールです。イメージの明るさ、コントラスト、色味で材質の構成がわかりやすく表示されます。ラマンイメージ同士を重ねることで、複数の物質の分布や性質を同時に確認することもできます。
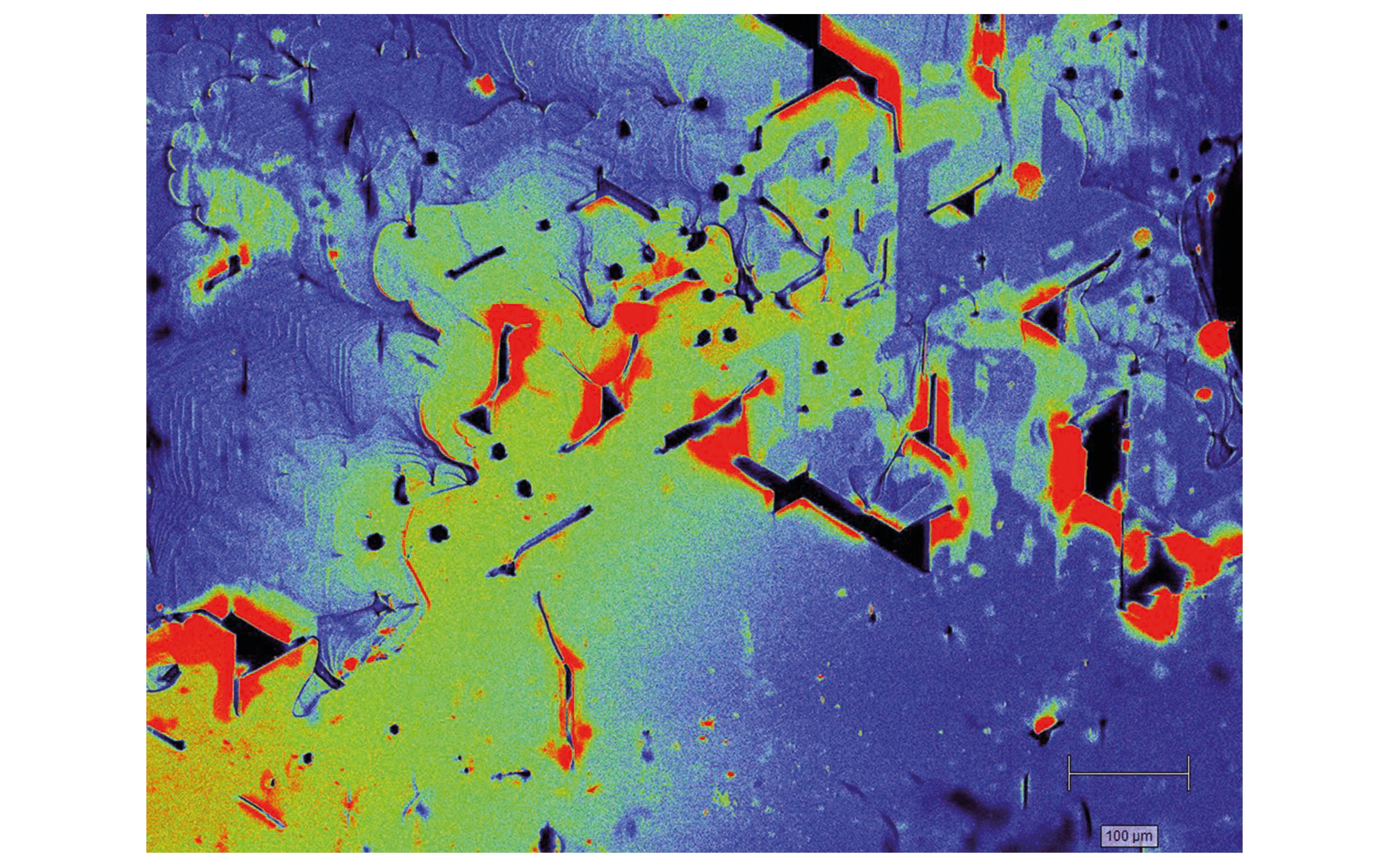
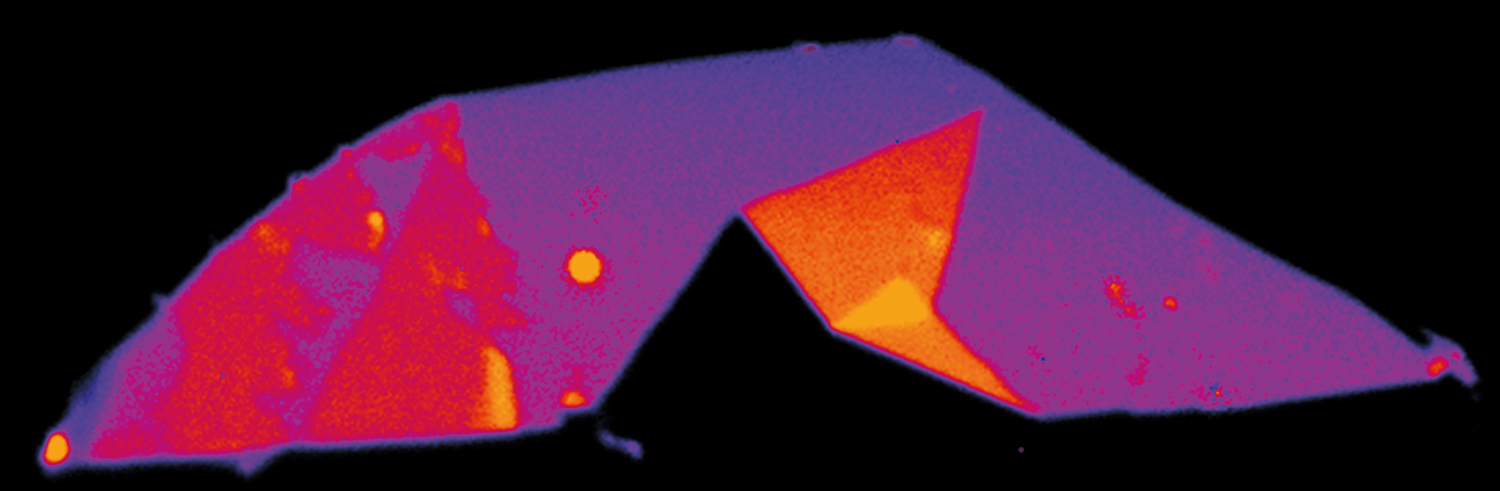
SiC ウェハのラマンイメージ。イメージの面積は約 1mm2 で、6H 炭化ケイ素、3C 炭化ケイ素または Si (赤)、くぼみ (黒) が示されています。青から緑の部分がゆがみです。
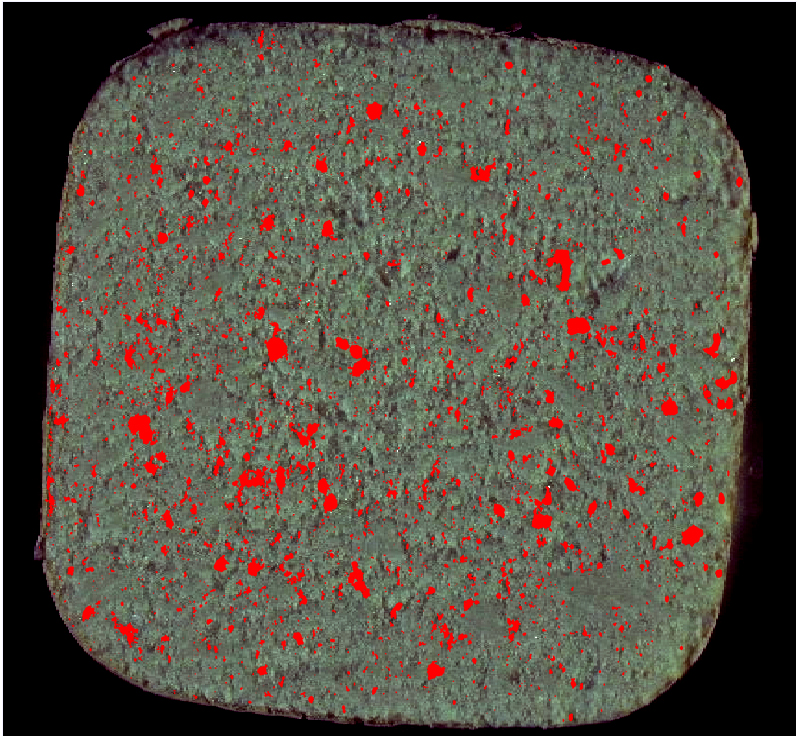
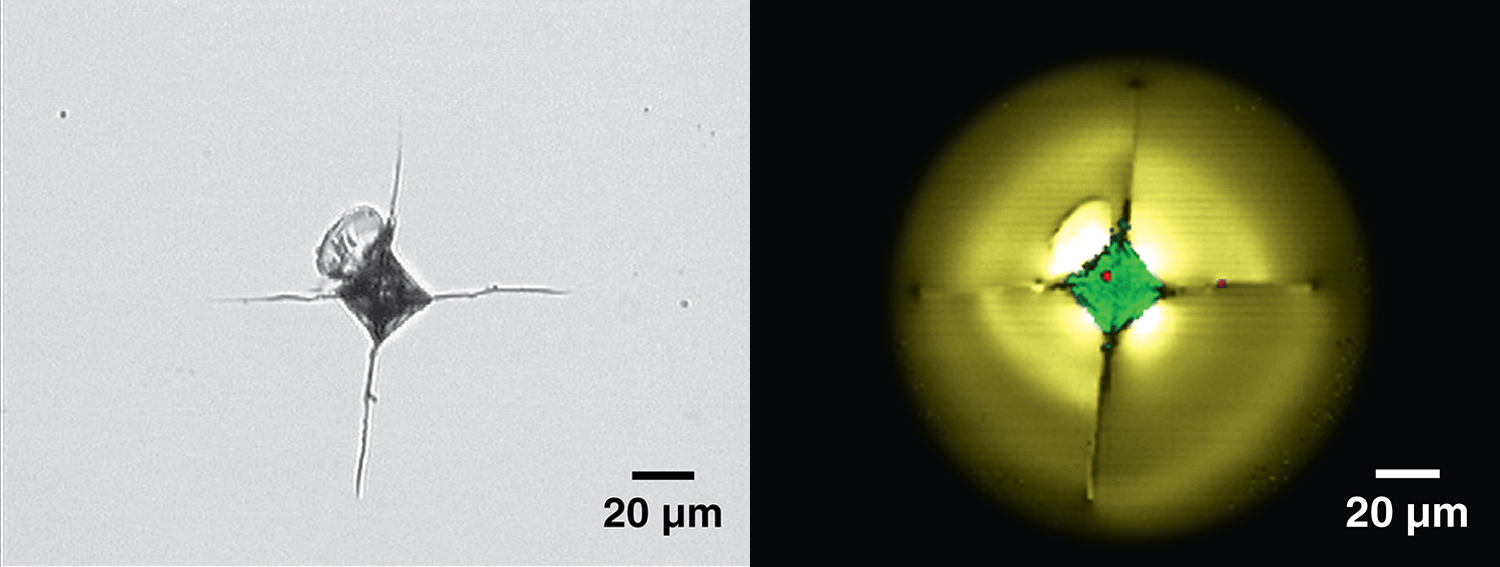
 経口錠剤に含まれるモンテルカスト API のラマンイメージ。API のドメインが色分けされており、視覚的に表されています。
経口錠剤に含まれるモンテルカスト API のラマンイメージ。API のドメインが色分けされており、視覚的に表されています。
ラマンイメージの収集方法
ラマンマイクロスコープを使ってサンプルからラマンスペクトルを収集します。収集したラマンスペクトルはデータファイル (スペクトルハイパーキューブ) に保存し、スペクトルハイパーキューブを分析して、ラマンイメージを生成します。
ラマンイメージングの手法には以下の種類があります。
ポイントフォーカス
サンプルにレーザーをスポットで当てる手法です。サンプルを電動式ステージに置き、このステージがレーザーの下で移動します。そしてサンプルの各ポイントからスペクトルが収集されます。
ポイントフォーカスイメージングの高速版として、レニショーでは StreamHR™ と StreamHR™ Rapide を実装しています。StreamHR Rapide を使ったラマンイメージングなら、1 秒あたり 1,000 ポイント以上からスペクトルを取得できます。
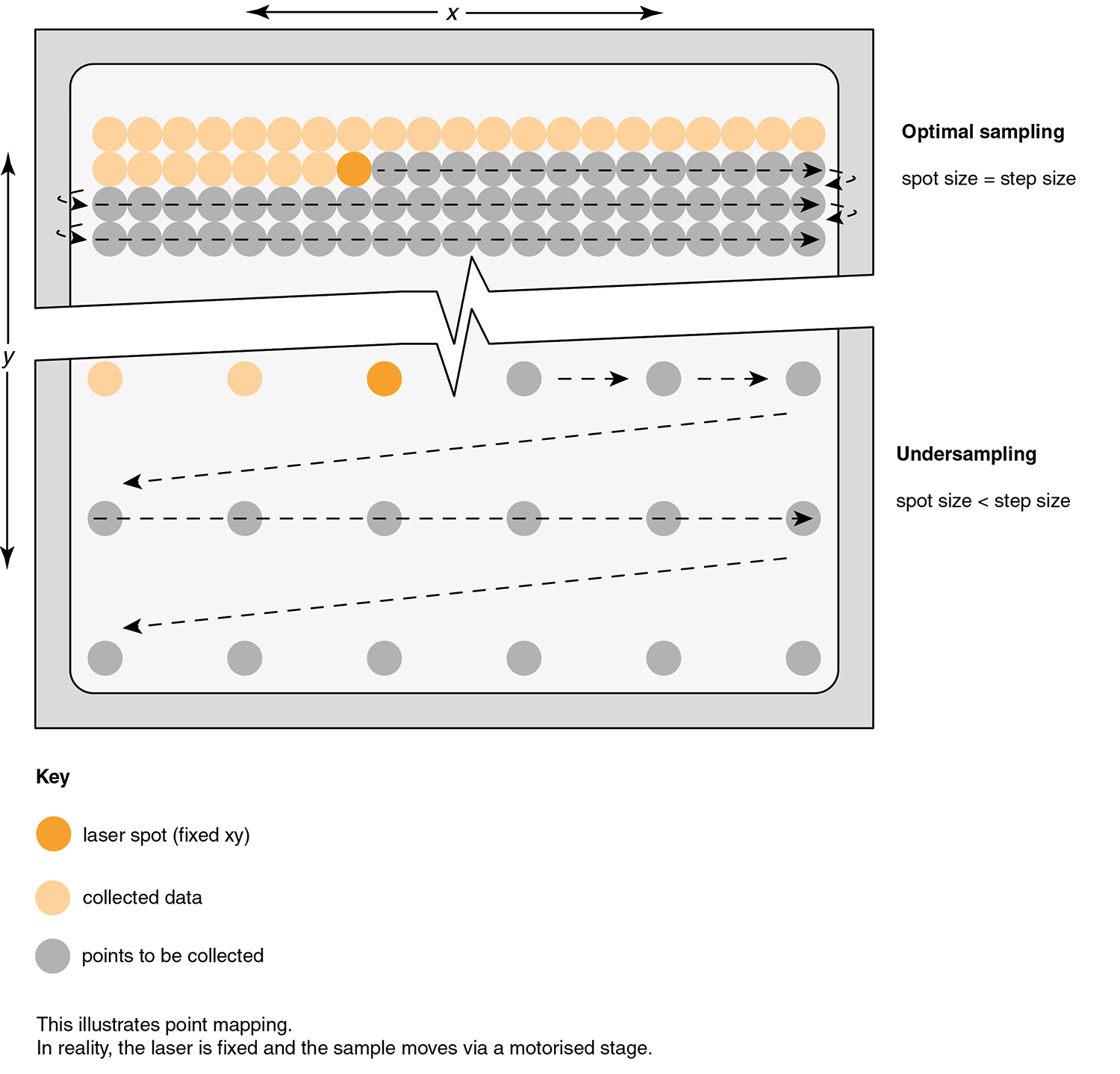
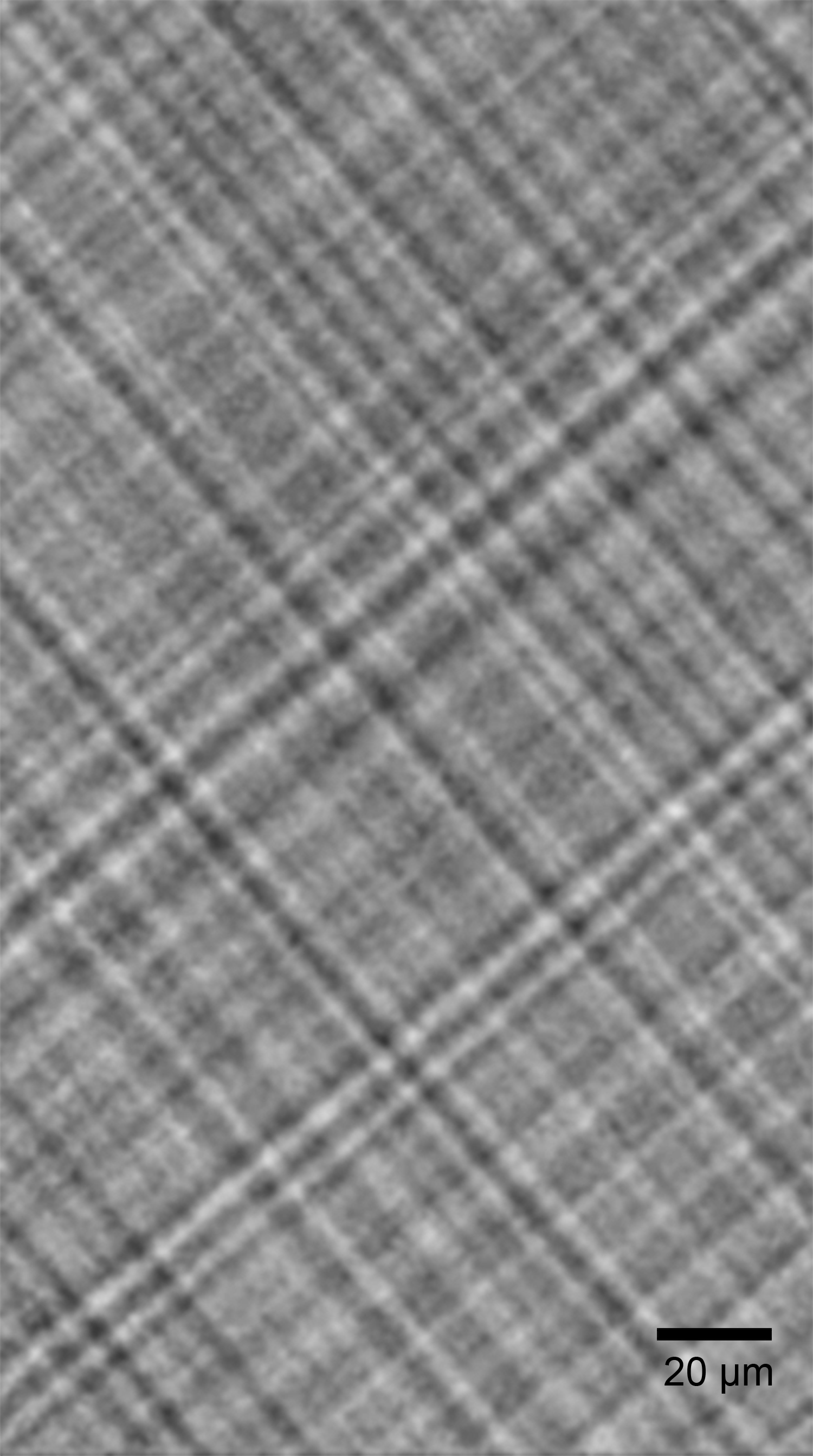
ポイントフォーカスのイメージングによる最適なサンプリングとアンダーサンプリングの例。
ラインフォーカス
レーザーが、スポットではなくライン状に照射される手法です。サンプル上の複数のポイントからスペクトルを同時収集するため、時間を短縮できます。この方法では、サンプルを損傷させずに、レーザーパワーを上げることができます。この手法用の拡張機能として、レニショーでは StreamLine™ を実装しています。
イメージング中は、アンダーサンプリングのネガティブな要素について考慮することが重要です。レーザーのスポットまたはライン幅が、取得ポイントの間隔よりも小さい場合をアンダーサンプリングと呼びます。レニショーでは、この問題を Slalom モードと StreamLine を組み合わせることで解決しています。
Streamline™ と Slalom モードを組み合わせることで、ステップ (ピクセル) のサイズが大きくても、サンプル全体を確実にカバーできます。大きなサンプルでも、モレなく短時間でラマンイメージングを行うことができます。
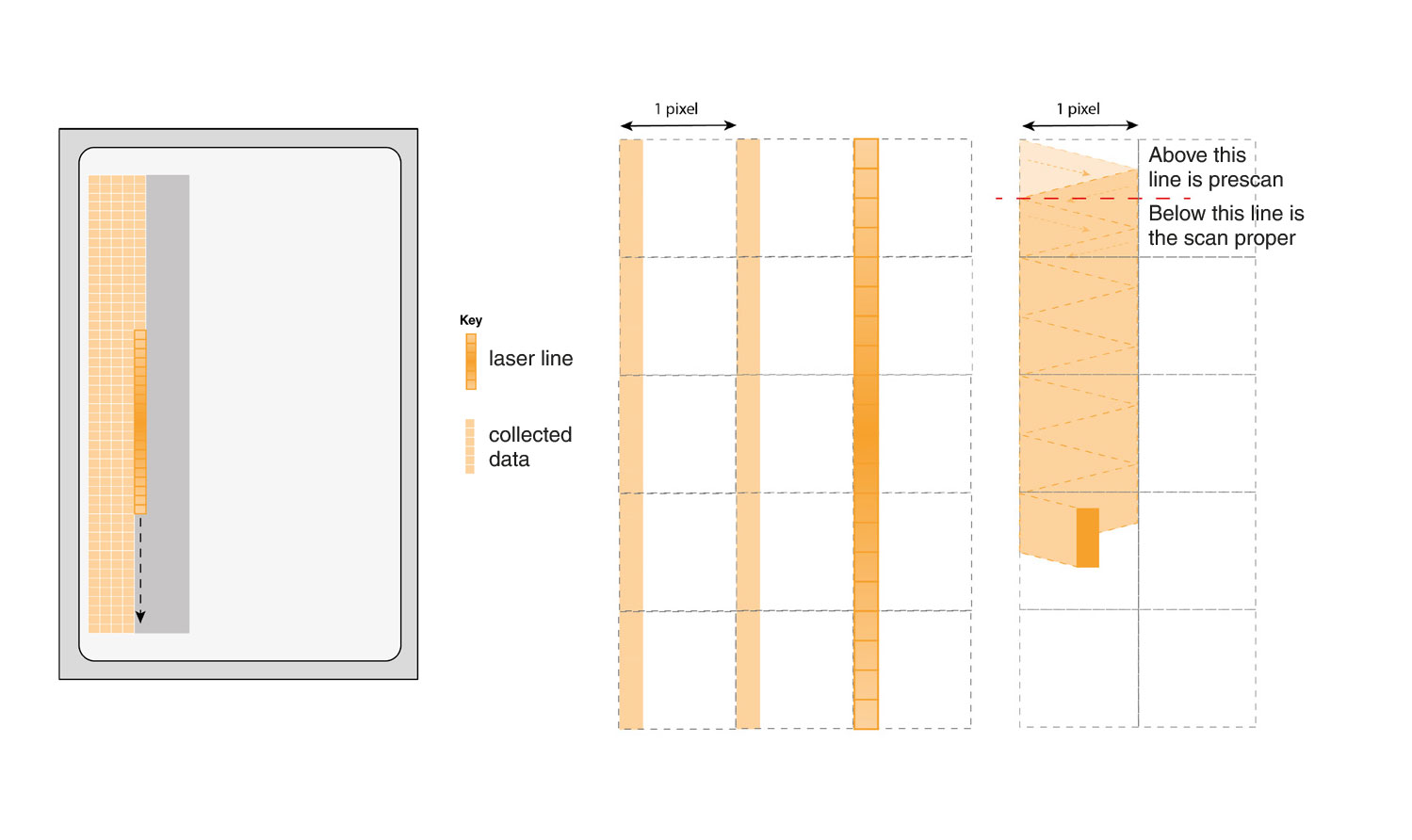
StreamLine で高速かつ繊細なラマンイメージング
レーザーのラインが Y 軸に沿ってサンプルに照射されてスキャンされ、同時に、CCD 検出器によってサンプルからデータが収集されます。
X 軸方向へは、レーザーラインの幅でステップを刻んでいきます。かかる時間が最短というわけではありませんが、全体をカバーできる手法です。
Slalom モードを使わないアンダーサンプリング
X 軸方向に、レーザーラインの幅よりも大きなステップを刻むと、スキャンされない領域が生まれ、分析されないサンプル領域が生じてしまいます。このイラストでは、サンプルの約 20% からしかデータを収集できていません。
StreamLine と Slalom モードの組合せなら短時間で全体をカバー
レーザーラインをジグザクに動かすことで、ステップ間の領域もスキャンするため、X 軸方向に、レーザーラインの幅よりも大きなステップで移動させることができます。
最短の時間で、サンプルの 100% 全体からデータを収集できます。
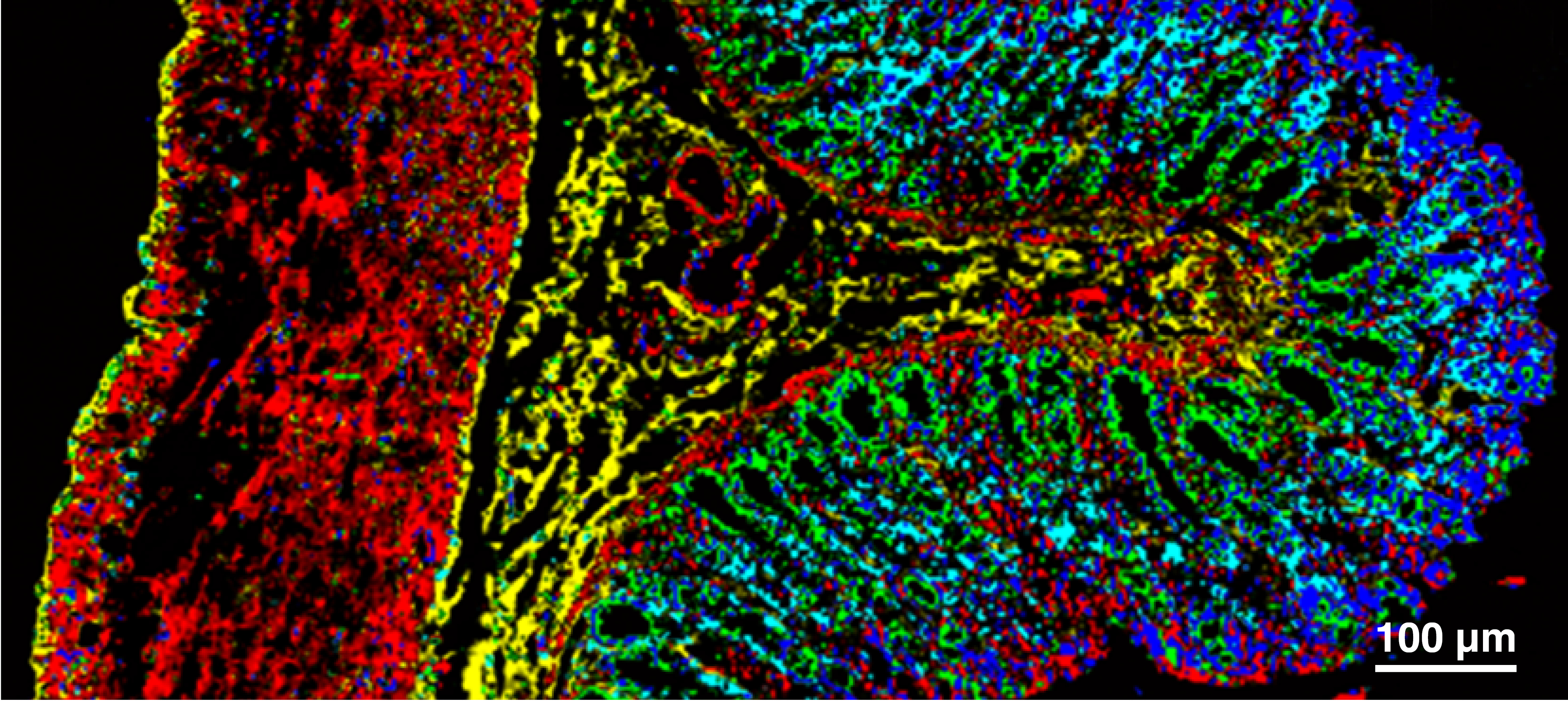
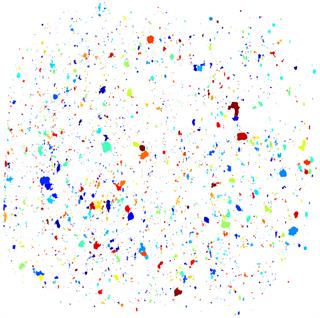
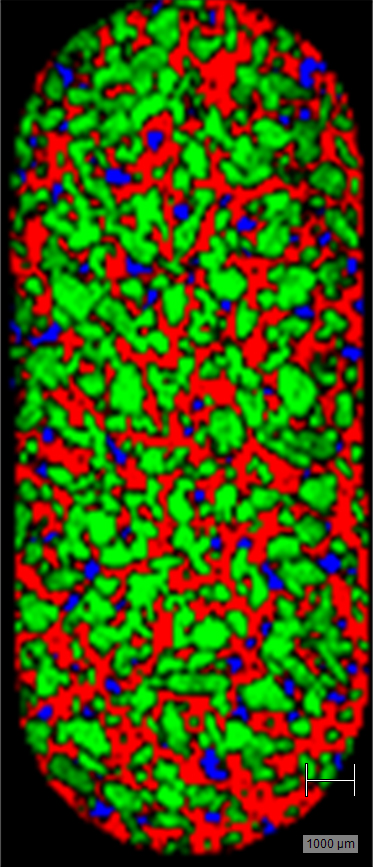
健康なラットの結腸陰窩内の組織のラマンイメージ。PCA で作成。
ラマンイメージの分析方法
ラマンスペクトルを分析することで、1D データ、2D イメージ、3D イメージを生成することができます。ラマンイメージでは、ラマンバンドの強度など単純な単変量バンドが示されます。また、ラマンスペクトル全体に多変量解析を行うこともできます。
レニショーの WiRE™ ソフトウェアには、ラマンイメージングのためのデータ分析機能が多数搭載されています。
スペクトルの波数 1 点での強度
こういったイメージは簡単に生成できるものの、誤解を招くおそれがあります。対象のラマンバンドから発生する強度と広範な蛍光のバックグラウンドによる強度を区別できないためです。
カーブフィットパラメータ
ラマンイメージの各スペクトルでは、各ラマンバンドに理論上のカーブをフィットすることができます。ラマンシフト、バンド幅、相対強度といったラマンバンドの各要素を算出できます。ラマンイメージでは多くの場合、バンドのラマンシフトのばらつきが示されます (局部応力がわかります)。ラマンバンドの幅のばらつきが示されることもあり、結晶化度の差がわかります。
多変量パラメータ
1 点のラマンピークパラメータ (1 点の波数の強度やカーブフィットされた 1 個のバンド) だけでなく、スペクトル全体からの情報を使用する多変量解析は、非常に強力です。概して、より詳しい化学的特異性を示す、上質なラマンイメージを得られます。
サンプルに含まれる化学物質に対して参照となるスペクトルがあると、その化学物質の分布を示すラマンイメージを容易に作成することができます。この場合、直接分類の最小二乗法 (DCLS) または非負の最小二乗法 (NNLS) のような成分解析手法が用いられることになりますが、このような成分解析手法からは濃度を定量的に推定することができます。
参照スペクトルがない場合は、クラスタ解析、主成分分析 (PCA)、レニショーの EmptyModelling™ 機能などを使ってラマンイメージを生成することが可能です。なお、これらの手法は、サンプルに何が含まれているかを把握しなくても適用することができます。これらの手法を介し、ラマンスペクトル間の規則的な分散を解析し、スペクトル成分が推定されます。そしてラマンイメージからは、サンプル内のスペクトル成分の分布がわかります。
生物組織や細胞のラマンイメージの分析には、クラスタ解析や PCA が用いられることが少なくありません。これらは効果的な計量化学手法であり、純粋な生化学物質を含んでいることが少ない生化学サンプル内の構造を検出することが可能です。
EmptyModelling は、多変数カーブ分離-交互最小自乗 (MCR-ALS) 解析を使いやすくした機能です。サンプルの、純粋な成分の不明領域を特定するラマンイメージを生成することができます。半導体のウェハや製剤のようなサンプルで重要です。
イメージギャラリ







ラマン分光とは
ラマン分析、フォトルミネッセンス (PL) についてご興味をお持ちでしたら、当社までお問い合わせください。高速ラマンイメージング、データ解析などについてお答えいたします。
ラマン分光の概要